向量索引
高效率地从高维向量中, 做相似性查找, 是个让人头疼的问题, 但这又有非常多的应用场景, 比如相似推荐, 以图搜索等. 解决这个问题的方法也有很多, 比如 annoy, hnsw 等等. 京东开源的 vearch, Apache 开源的 Milvus.
HNSW 算法理论
Hierarchcal Navigable Small World graphs, 常用有三个实现
- nmslib, Non-Metric Space Library, An efficient similarity search library and a toolkit for evaluation of k-NN methods for generic non-metric spaces.
- hnswlib, Header-only C++/python library for fast approximate nearest neighbors
- faiss, A library for efficient similarity search and clustering of dense vectors.
从 ann-benchmarks 来看, numslib 实现效果最佳.
朴素想法
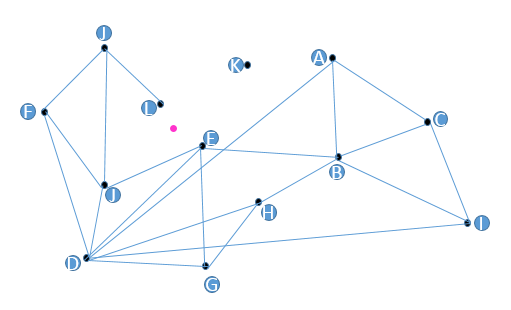
假设我们现在有 13 个 2 维数据向量,我们把这些向量放在了一个平面直角坐标系内,隐去坐标系刻度,它们的位置关系如上图所示。
朴素查找法: 把某些点之间连上线, 构成一个查找图, 有连接关系的点称为 “友点”. 当我们想查找与粉色点最近的点时, 我们从任意黑色点出发, 计算它以及所有友点, 与粉色点的距离, 从中选出离粉色点最近的一个点, 作为下一个出发点, 继续前面的步骤. 如果当前黑色点比它所有的友点都近, 那么终止查找, 这个黑色点就是距离粉色点最近的点.
- 假设从 C 点出发, 计算 (C,A,B,I) 与粉色点的距离, B 最近
- 从 B 点出发, 计算 (B,E,H) 与粉色点的距离 (遍历过的节点跳过), E 最近
- 从 E 点出发, 计算 (E,J,D,G) 与粉色点的距离, E 最近, 终止查找
就这个场景而已, 最近的应该是 L, 我们一起来看看朴素想法有哪些缺陷:
- K 点无法被查询到
- 假设我们要查找最近的两个点, 但这两个点之间又没有连线, 那么会大大影响效率
- D 点真的需要这么多友点吗? 如何确定谁和谁是友点
解决方案也很简单, 在构图时
- 所有数据向量节点都必须有友点
- 所有距离相近 (相似) 到一定程度的向量必须互为友点
- 尽量减少每个节点的 “友点” 数量
在图论中, 正好有个算法专门解决上述缺陷 — 德劳内 (Delaunay) 三角剖分算法. 这个算法可以达成如下要求: 1,图中每个点都有“友点”。2,相近的点都互为“友点”。3,图中所有连接(线段)的数量最少。效果如下图。
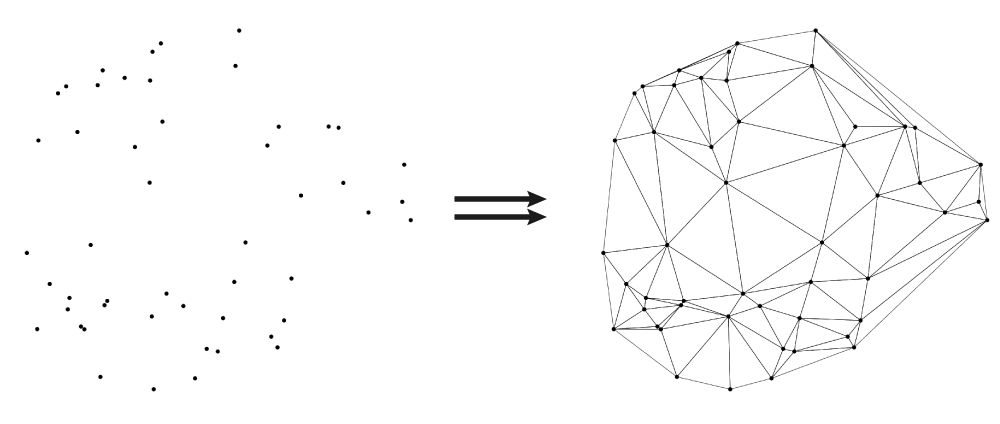
实际上, HNSW 并未采用德劳内三角剖分法来构建查找图, 因为时间复杂度太高, 此外, 查找效率不够高, 如果初始点与临近点距离很远的话, 我们需要多次跳转才能到达, 需要“高速公路”机制.
NSW 构图法
随机逐个插入节点, 当插入节点时, (按前面的朴素想法) 找到与图中最近的 m 个节点, 连上边即可.
构图算法是逐点随机插入的,这就意味着在图构建的早期,很有可能构建出“高速公路”。
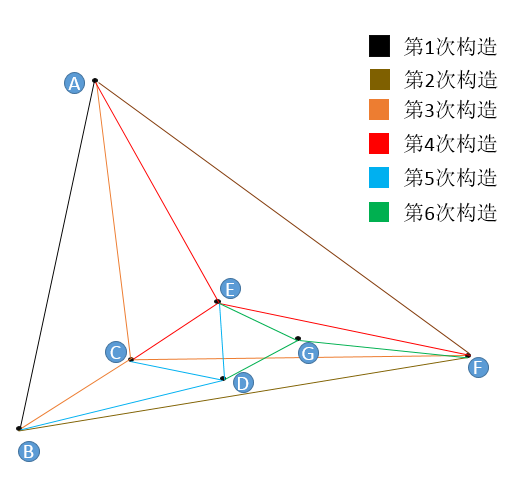
我们对 7 个二维点进行构图,用户设置 。
- 首先初始点是 A 点(随机出来的),A 点插入图中只有它自己,所以无法挑选“友点”。
- 然后是 B 点,B 点只有 A 点可选,所以连接 BA,此为第 1 次构造。
- 然后插入 F 点,F 只有 A 和 B 可以选,所以连接 FA,FB,此为第 2 此构造。
- 然后插入了 C 点,同样地,C 点只有 A,B,F 可选,连接 CA,CB,CF,此为第 3 次构造。
- 重点来了,然后插入了 E 点,E 点在 A,B,F,C 中只能选择 3 个点作为“友点”,根据我们前面讲规则,要选最近的三个,怎么确定最近呢?朴素查找!由此,我们找到了 E 的三个近点,连接 EA,EC,EF,此为第四次构造。
- 第 5 次构造和第 6 次与 E 点的插入一模一样,都是在“现成”的图中查找到 3 个最近的节点作为“友点”,并做连接。
HNSW 就是 NSW 再优化版本, 改天继续看
nmslib 版 hnsw 性能调研
测评方案:
- 测试版本为 nmslib1.6
- 按照业务场景,随机构造 100 维的 30 万篇笔记,随机选择 query 获取 10 篇最近邻笔记
- hnsw 在索引构建环节有 3 个重要可调参数 (M,efConstruction,post 默认为 2), 测评中选择距离度量方式为 l2; 在 query 环节有 1 个可调参数(efSearch)。官网参数调优说明,参数调优
- 测试机器为 rec-dev01h,索引构建默认会按照核数并发,query 只使用单线程
- 衡量指标:
- 构建时间
- 内存占用
- query时间
- recall
方案选择逻辑:
- 对不同参数下的结果按照 recall 进行排序
- 分别算出
query_time,memory,index_time在整体中的排名,综合成本使用query_time排名 +index_time排名 - 先选定预期的 recall,如 0.99,选择符合 recall 需求的综合成本最低的方案,本次测试中 recall 0.99 的最佳方案如下图,单次 query 耗时 6.43ms,构建时间为 310s

实际测试数据:

数据分析:

